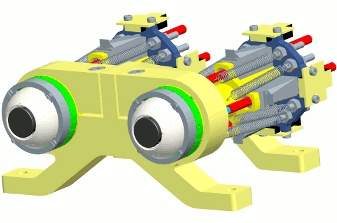
Modelo em CAD do sistema de visão artificial usado pelos pesquisadores [Imagem: Eyeshots]
Visão e percepção robóticas
Depois de três anos de trabalho, pesquisadores do projeto europeu EYESHOTS apresentaram os resultados de um estudo cujo objetivo era reproduzir em robôs comportamentos humanos, como a visão e a percepção espacial.
Graças aos progressos no controle da interação entre visão e movimento, os pesquisadores desenvolveram um avançado sistema de visão tridimensional, sincronizado com braços robóticos.
O protótipo mostrou ser possível dar aos robôs a capacidade para observar e ficarem atentos ao que acontece ao seu redor.
Além disso, as imagens capturadas são mantidas na memória, podendo ser utilizadas em suas ações futuras.
A equipe de Ángel del Pobil Pasqual, da Universidade Jaume I, na Espanha, ficou responsável pela validação dos resultados do projeto, usando um robô construído na Universidade de Castellón, constituído de uma cabeça de robô com olhos móveis integrados em um tronco com braços articulados.
Inspiração humana
Os modelos de computador usados para controlar o robô partiram do conhecimento da biologia humana e animal, fruto de um trabalho multidisciplinar que incluiu especialistas em neurociência, psicologia, robótica e engenharia.
O estudo começou com o registro dos neurônios do córtex visuo-motor de macacos, que possuem uma percepção do ambiente similar à dos seres humanos.
A primeira característica do sistema visual dos primatas replicado artificialmente foi o chamado movimento sacádico dos olhos, que está relacionado com a alteração dinâmica da atenção.
"Estamos constantemente mudando o ponto de vista através de movimentos oculares muito rápidos, tão rápidos que dificilmente ficamos conscientes deles," explica o Dr. Pasqual. "Quando os olhos estão se movendo, a imagem fica desfocada e não podemos ver claramente. O cérebro deve integrar os fragmentos de imagens como se fossem peças de um quebra-cabeça, para dar a impressão de uma imagem contínua e perfeita do nosso entorno."
"Nossos resultados poderão ser aplicados a qualquer tipo de robô humanoide que seja capaz de mover seus olhos e se concentrar em um ponto." [Imagem: Ruvid]
Neuro-robótica
Partindo dos dados neurais, os pesquisadores desenvolveram modelos computadorizados da seção do cérebro que integra as imagens com os movimentos dos dois olhos e dos braços.
Essa integração é muito diferente daquilo que normalmente é feito por engenheiros e especialistas em robótica - é uma espécie de neuro-robótica.
O grupo queria provar que, quando fazemos um movimento para agarrar um objeto, o nosso cérebro não precisa calcular previamente as coordenadas desse movimento.
"A verdade é que a sequência é muito mais simples: os nossos olhos olham para um ponto e dizem ao nosso braço onde ir. Os bebês aprendem isto progressivamente conectando neurônios," explica o pesquisador.
Assim, o próximo passo foi simular também esses mecanismos de aprendizagem, usando uma rede neural que permite aos robôs aprenderem como olhar, como construir uma representação do ambiente, como preservar as imagens apropriadas, e como usar sua memória para alcançar os objetos, ainda que estes estejam fora do alcance dos seus olhos naquele momento.
Passo importante
Os resultados preliminares foram encorajadores, dentro dos parâmetros dos programas de teste.
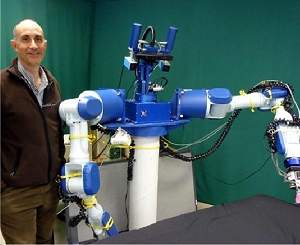
"Nossos resultados poderão ser aplicados a qualquer tipo de robô humanoide que seja capaz de mover seus olhos e se concentrar em um ponto. Essas são questões prioritárias para que os outros mecanismos possam funcionar corretamente", ressalta o pesquisador.
Para que um robô humanoide interaja com sucesso com o seu ambiente e desenvolva tarefas sem supervisão, contudo, será necessário primeiro aperfeiçoar esses mecanismos básicos, que ainda não estão completamente resolvidos, alerta o pesquisador.
Fonte:http://www.inovacaotecnologica.com.br/noticias/noticia.php?artigo=neuro-robotica-comportamentos-humanos-robos&id=010180110607&ebol=sim
Nenhum comentário:
Postar um comentário