Redação do Site Inovação Tecnológica - 13/07/2012

Depois de aprender seus movimentos iniciais em um robô construído no laboratório da universidade, o cerebelo artificial agora será transplantado para um robô industrial estado-da-arte. [Imagem: Niceto R. Luque]
Cerebelo de robô
Pesquisadores espanhóis desenvolveram um cerebelo artificial que controla um braço robótico com uma precisão quase humana.
O cerebelo é a parte do cérebro humano que controla o sistema locomotor e coordena os movimentos do corpo.
É verdade que robôs podem ser muito mais rápidos e muitíssimo mais precisos do que uma mão humana.
Contudo, se isso é uma vantagem para robôs industriais, manipulando peças em alta velocidade, torna-se um problema para robôs que devem interagir diretamente com trabalhadores humanos.
Simulador neural
As técnicas de alta velocidade usadas nos robôs industriais, ao requererem forças intensas, tornam-se perigosas para os seres humanos; e por consumirem muita energia, são inadequadas para robôs móveis ou autônomos.
Isso levou Niceto Luque e seus colegas da Universidade de Granada a desenvolverem um cerebelo virtual, um simulador neural que controla o robô, não por instruções detalhadas e rígidas, mas por um sistema de aprendizado e adaptação.
Além de armazenar suas "leituras sensoriais", o sistema adapta-se a correções, em vez de simplesmente travar, como acontece com circuitos eletrônicos comuns.
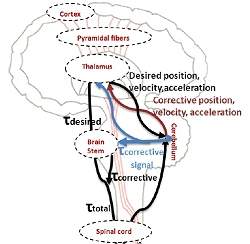
Modelo que serviu de inspiração para o desenvolvimento do simulador neural, que está disponível no endereço http://code.google.com/p/edlut. [Imagem: Luque et al./IJNS]
"Além disso, ele grava os comandos motores para prever a ação ou o movimento a ser realizado pelo braço robótico," diz o pesquisador.
Em outras palavras, o robô dotado do cerebelo artificial aprende automaticamente conforme ele vai manipulando diferentes objetos.
É possível também dizer a ele "Vá daqui até lá" e ele se vira para encontrar a melhor forma de fazer isso, sem tropeçar em seus colegas.
Transplante virtual
O controle tradicional de robôs industriaisexige a inserção de comandos precisos para cada movimento.
Os problemas aparecem quando um trabalhador surge repentinamente na frente do robô.
Segundo o pesquisador, a adaptabilidade a condições variáveis propiciada pelo simulador neural dá ao robô condições ideais para a interação com seres humanos trabalhando lado a lado com ele em uma fábrica.
Depois de aprender seus movimentos iniciais em um robô construído no laboratório da universidade, o cerebelo artificial agora será transplantado para um robô industrial estado-da-arte.
Bibliografia:
From sensors to spikes: evolving receptive fields to enhance sensorimotor information in a robot-arm
Niceto R. Luque, Jesús A. Garrido, Jarno Ralli, Juanlu J. Laredo, Eduardo Ros
International Journal of Neural Systems
Vol.: Accepted: 01 June 2012
From sensors to spikes: evolving receptive fields to enhance sensorimotor information in a robot-arm
Niceto R. Luque, Jesús A. Garrido, Jarno Ralli, Juanlu J. Laredo, Eduardo Ros
International Journal of Neural Systems
Vol.: Accepted: 01 June 2012
Nenhum comentário:
Postar um comentário